
| Version 25 (modified by , 2 years ago) ( diff ) |
|---|
Self-Driving Vehicular Project
Team: Aaron Cruz [UG], Arya Shetty [UG], Brandon Cheng [UG], Tommy Chu [UG], Vineal Sunkara [UG], Divya Krishna [HS], Siddarth Malhotra [HS]
Advisors: Ivan Seskar and Jennifer Shane
Project Description & Goals:
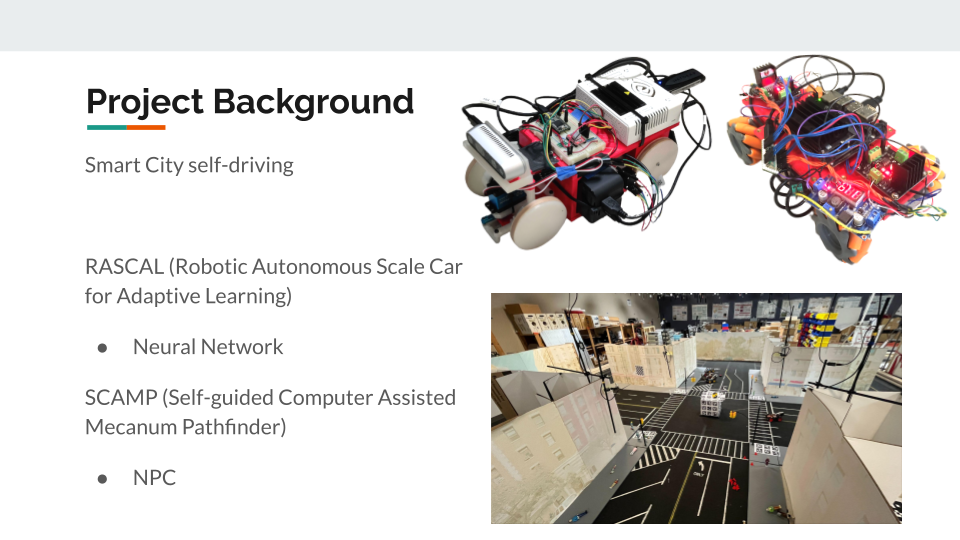
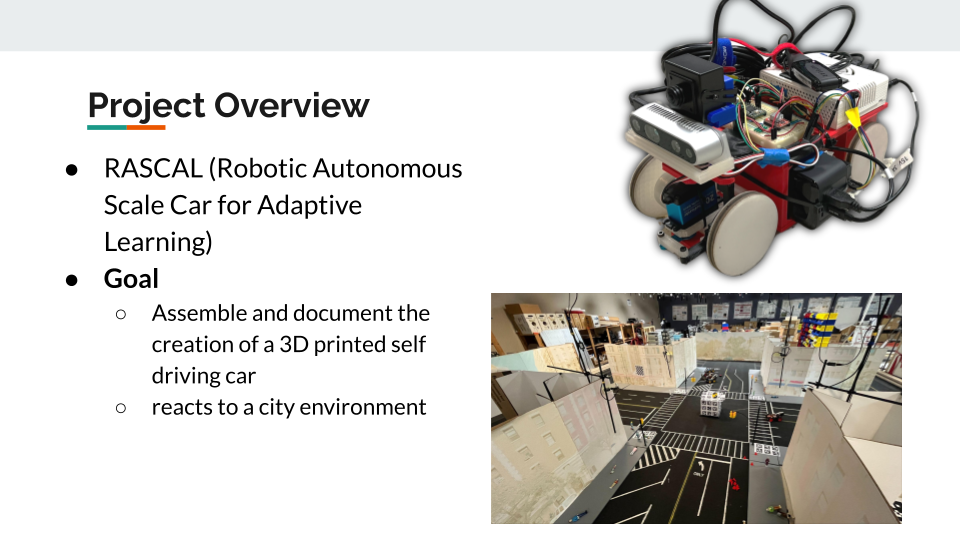
Build and train miniature autonomous cars to drive in a miniature city.
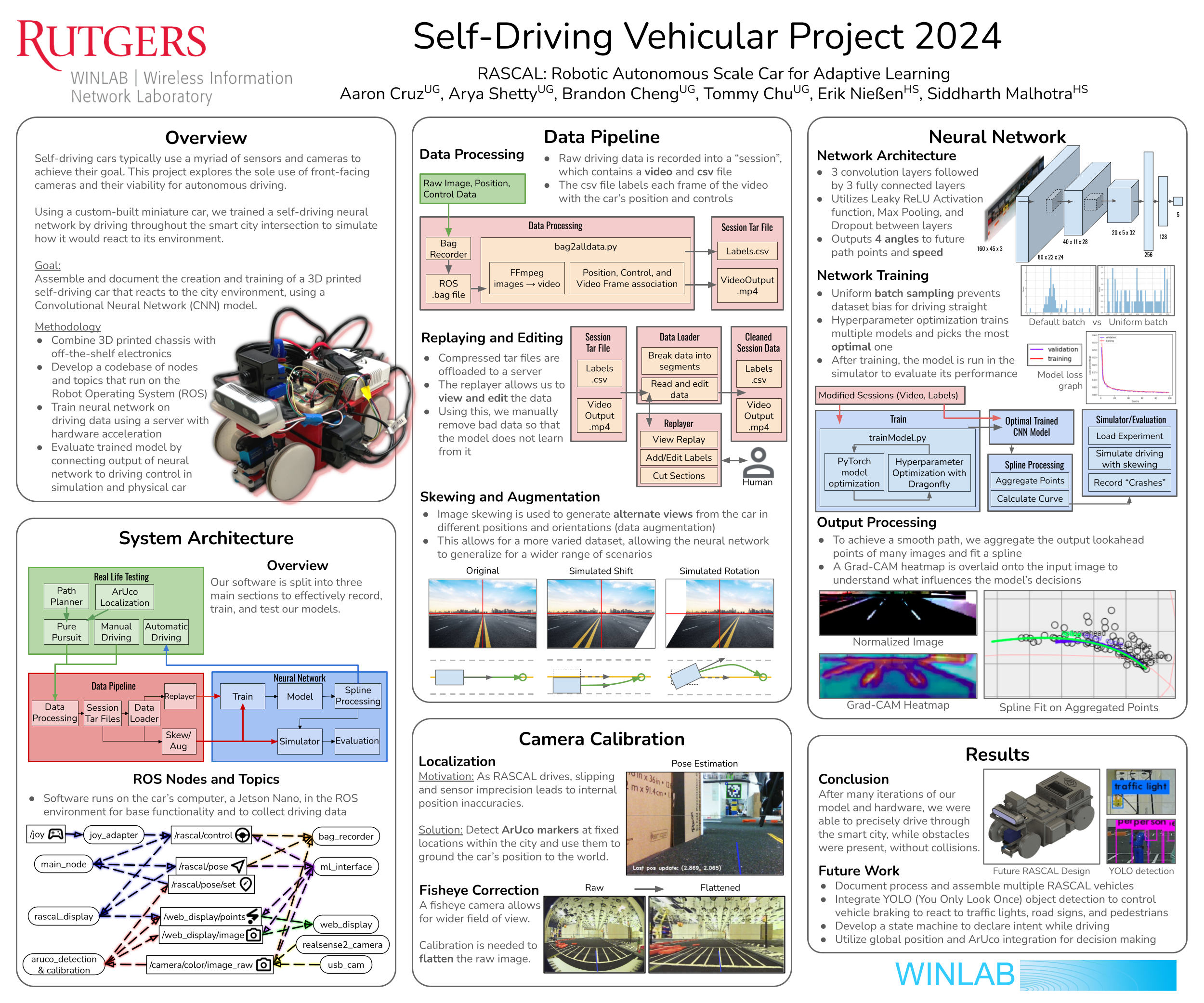
RASCAL (Robotic Autonomous Scale Car for Adaptive Learning): Using the car sensors, offload image and control data onto a server node. This node will use a neural network that will train the vehicle to move around on its own given the image data it sees through its camera.
Technologies: ROS (Robot Operating System), Pytorch
Week 1:
Progress:
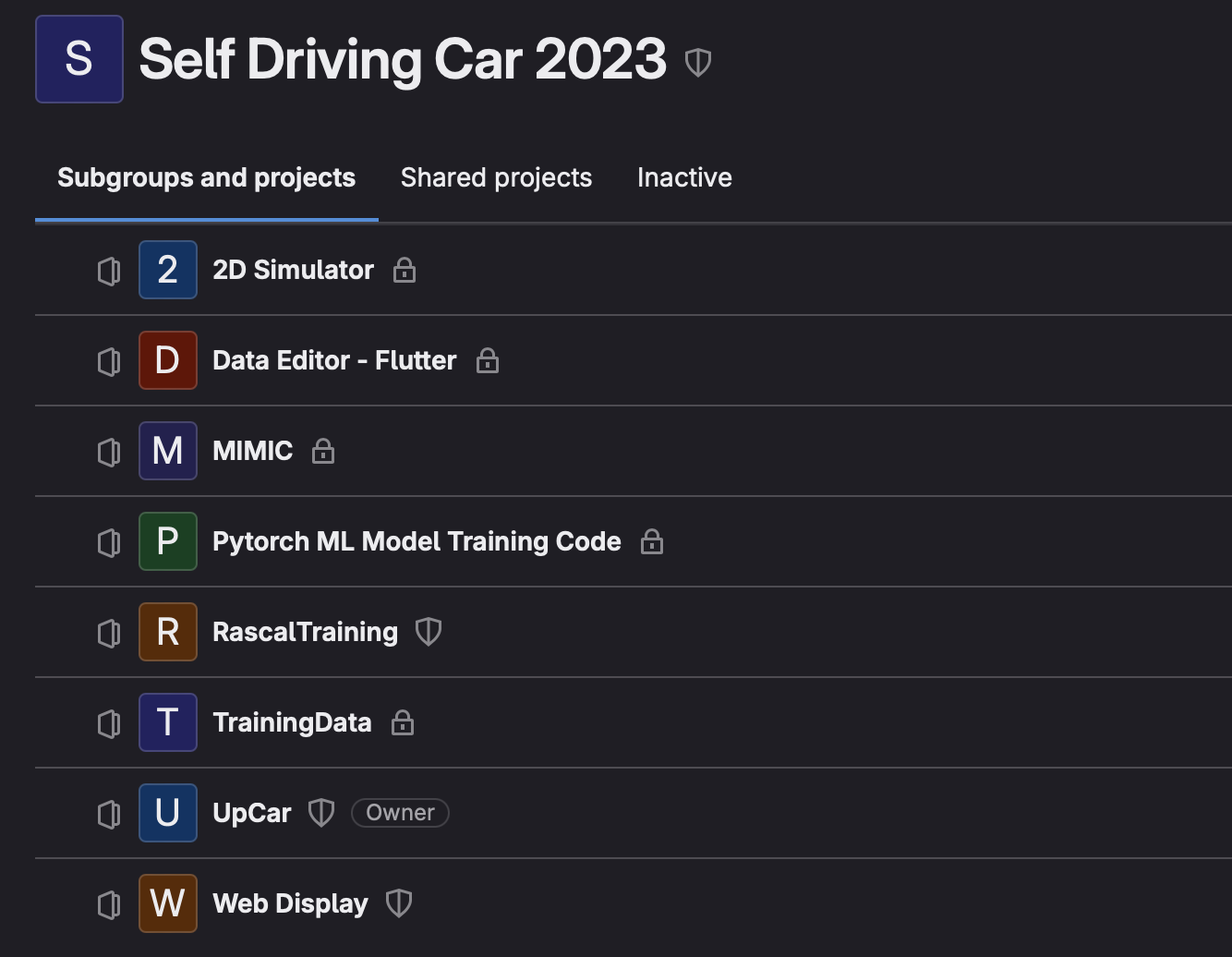
- Familiarize with past summer's work:GitLab, RASCAL setup, Software Architecture
- Debug issue with RASCAL's pure pursuit
{kind=link}
Week 2:
Progress:
- Setup X11 forwarding for GUI applications through SSH
- Visual odometry using Realsense Camera and rtabmap
- Streamline data pipeline that processes bag data (car camera + control data) into .mp4 video
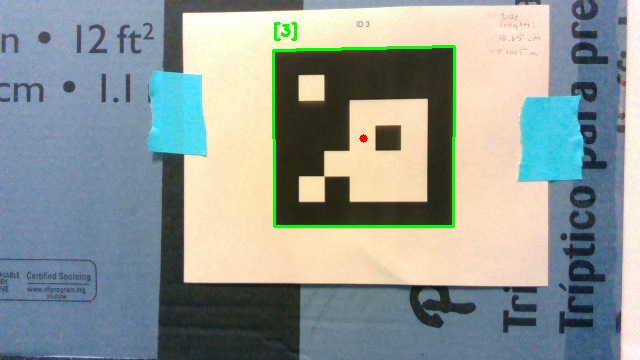
- Detect ARUCO markers from a given image using Python & OpenCV libraries
- Setup Intersection server (node with GPU)
- Develop PyTorch MNIST model
- Trained "yellow thing" neural network
- Line up perspective drawing with camera to determine FOV
Week 3:
[]
Progress:
- Created web display assassin to eliminate web server when closing ROS
- Tested "yellow thing" model, great results
- SSHFS setup
- Calibrate Real Sense camera
Attachments (5)
- Detected.png (361.9 KB ) - added by 2 years ago.
- gitlab.png (134.3 KB ) - added by 2 years ago.
- SDC Week 2.png (406.3 KB ) - added by 2 years ago.
-
SDC 2024 WINLAB Poster.png
(2.1 MB
) - added by 2 years ago.
Poster
- SDC Open House 2024 .png (405.3 KB ) - added by 2 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Note:
See TracWiki
for help on using the wiki.