|

|
|
|
|
|
Trilateration is the method of determining location of an object through relative distances of points and geometry of spheres. It is a method that is used in Global Positioning Systems but we intend to use the same principle in indoor localization.
As illustrated below, knowing an object's relative distance from Boise, Minneapolis and Tucson, one can derive that that object is in Denver. Similarly, knowing a person's location from three USRPs enables us to roughly estimate his position in an indoor place.
||
|
|
|
|
|
|
|
|
|
|
|
|
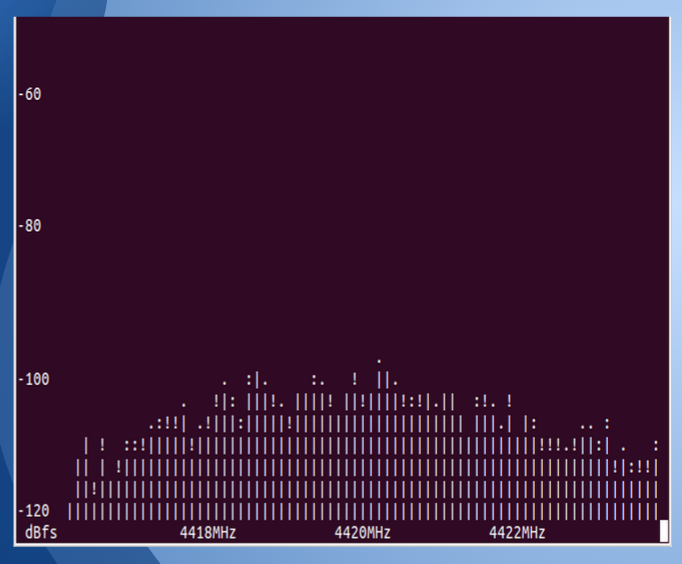
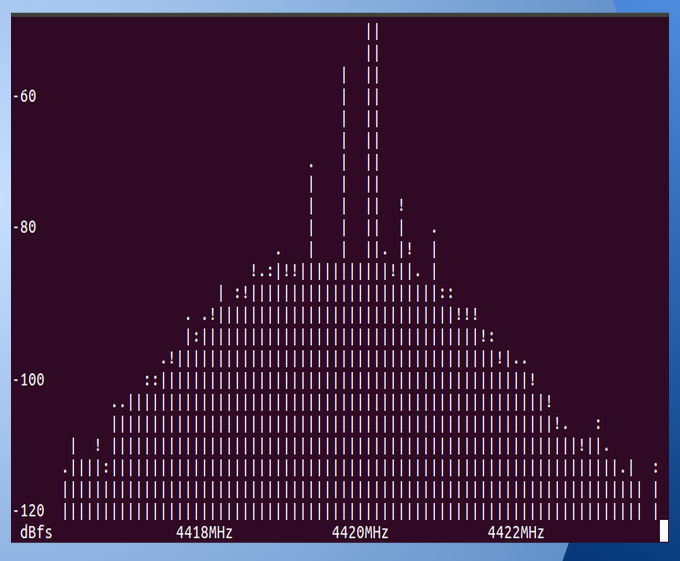
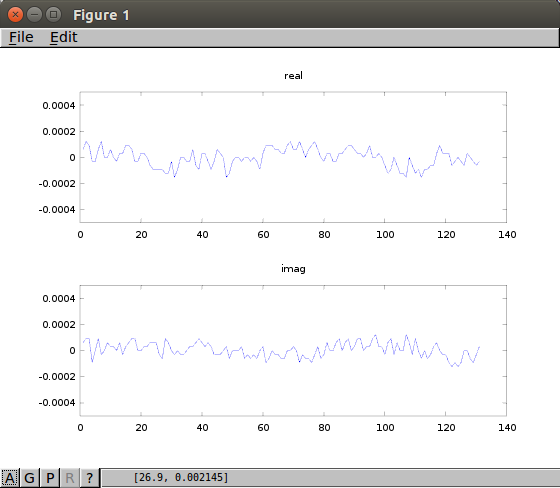
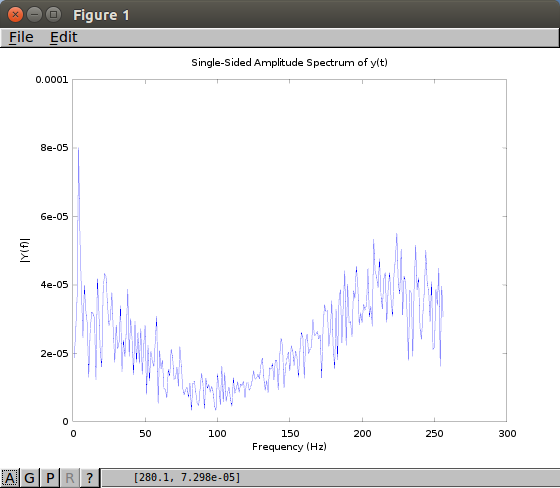
| Analysis: The left image shows signal reception when there is no signal transmitted. This is the noise that is present while we conduct experiments in the ORBIT room. The peak that is visible in the right image is the frequency that the transmitted signal is received at the receiver nodes. |
|
|
|
|
|
|
|
|
||
|
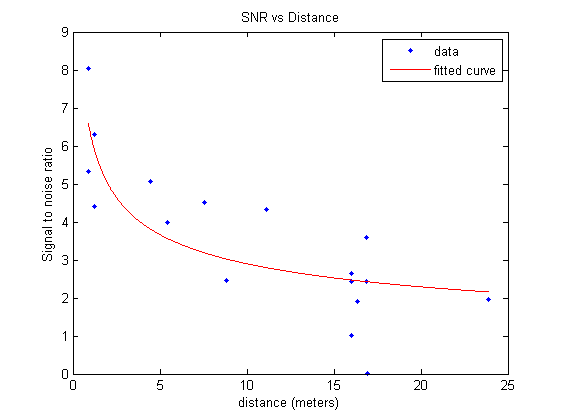
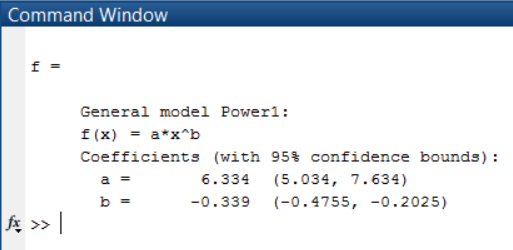
Analysis: As shown in this experiment, the line of best fit follows a generally negative and exponential curve but some of the points are no where close to the curve. The scattering of the data points signify either an error in signal processing or simply not enough data points. We believed the latter might have had a hand in this error. |
|

|

|
| Rahul Hingorani University of Michigan Industrial/Electrical Engineering |
Vineet Shenoy Rutgers University Electrical and Computer Engineering |
Karan Rajput Rutgers University Electrical and Computer Engineering |